7.1 Ethics & Ownership
AS Level · 2 questions found
What this topic covers
Section titled “What this topic covers”- Need for ethics as a computing professional; professional bodies: BCS, IEEE
- Impact of acting ethically or unethically for a given situation
- Copyright legislation; software licensing: Free Software Foundation, Open Source, shareware, commercial
- Introduction to AI: social, economic and environmental impact; applications of AI
Past paper questions
Section titled “Past paper questions” Q8
Permission to reproduce items where third-party owned material protected by copyright is included has been sought and cleared where possible. Every
reasonable effort has been made by the publisher (UCLES) to trace copyright holders, but if any items requiring clearance have unwittingly been included, the
publisher will be pleased to make amends at the earliest possible opportunity.
To avoid the issue of disclosure of answer-related information to candidates, all copyright acknowledgements are reproduced online in the Cambridge
Assessment International Education Copyright Acknowledgements Booklet. This is produced for each series of examinations and is freely available to download
at www.cambridgeinternational.org after the live examination series.
Cambridge Assessment International Education is part of Cambridge Assessment. Cambridge Assessment is the brand name of the University of Cambridge
8
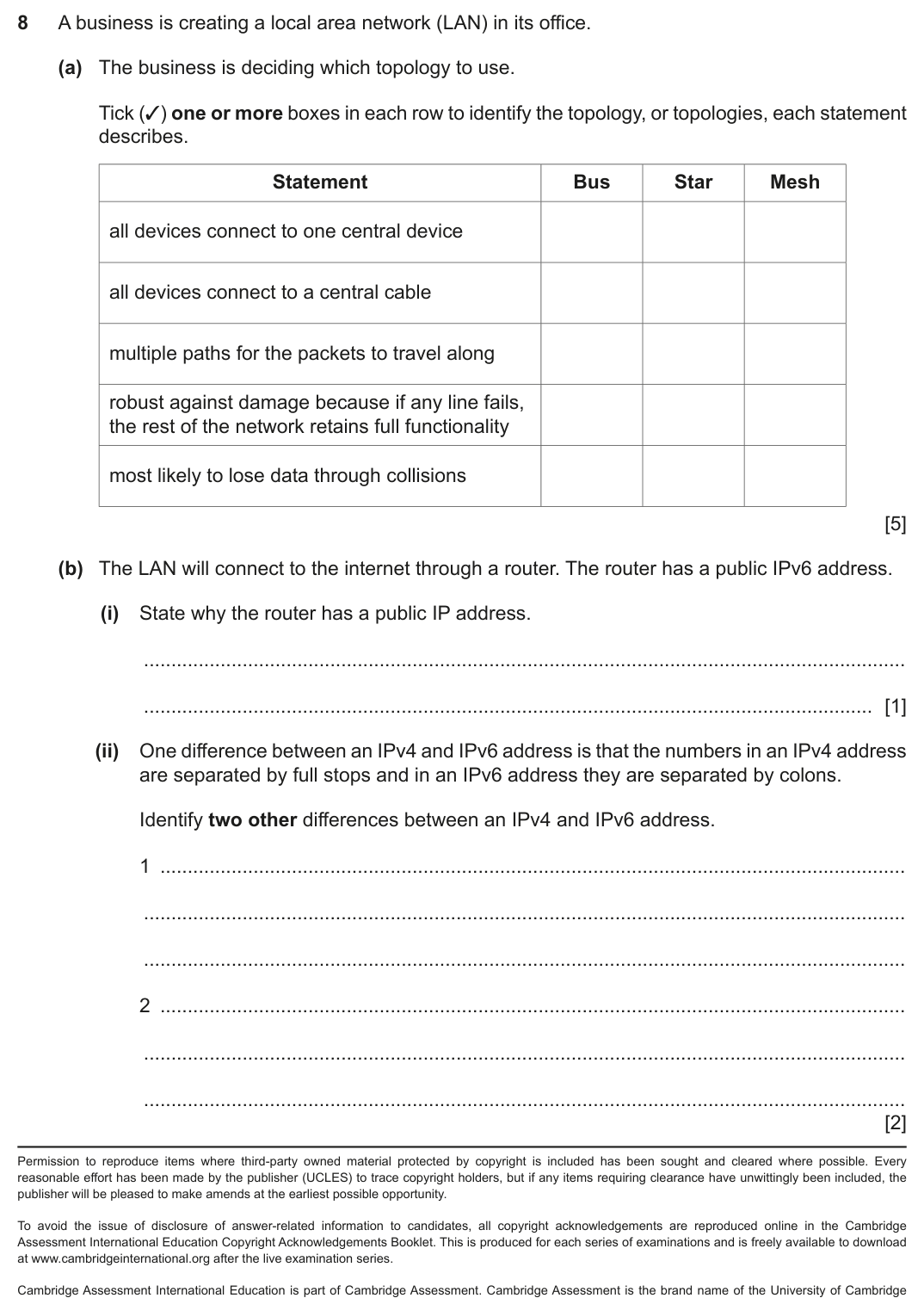
A business is creating a local area network (LAN) in its office.
(a) The business is deciding which topology to use.
Tick (✓) one or more boxes in each row to identify the topology, or topologies, each statement
describes.
Statement
Bus
Star
Mesh
all devices connect to one central device
all devices connect to a central cable
multiple paths for the packets to travel along
robust against damage because if any line fails,
the rest of the network retains full functionality
most likely to lose data through collisions
[5]
(b) The LAN will connect to the internet through a router. The router has a public IPv6 address.
(i) State why the router has a public IP address.
..................................................................................................................................... [1]
(ii) One difference between an IPv4 and IPv6 address is that the numbers in an IPv4 address
are separated by full stops and in an IPv6 address they are separated by colons.
Identify two other differences between an IPv4 and IPv6 address.
1 ........................................................................................................................................
2 ........................................................................................................................................
[2]
Show mark scheme
8(a) [5 marks]
1 mark
for each correct row:
Statement
Bus
Star
Mesh
all devices connect to one central device
all devices connect to a central cable
multiple paths for the packets to travel
robust against damage because if any line fails,
the rest of the network retains full functionality
most likely to lose data through collisions
for each correct row:
Statement
Bus
Star
Mesh
all devices connect to one central device
all devices connect to a central cable
multiple paths for the packets to travel
robust against damage because if any line fails,
the rest of the network retains full functionality
most likely to lose data through collisions
8(b)(i) [1 mark]
1 mark
for:
to
be visible
to and accessible by other devices on the internet
for:
to
be visible
to and accessible by other devices on the internet
8(b)(ii) [2 marks]
1 mark
each:
IPv4 has 4 groups of digits whilst IPv6 has 8 groups
IPv4 is usually represented in
denary
whilst IPv6 is usually represented
in
hexadecimal
IPv4 groups are between 0 and 255 whilst IPv6 is between 0 and FFFF
IPv4 is
32
bits whilst IPv6 is
128 bits
each:
IPv4 has 4 groups of digits whilst IPv6 has 8 groups
IPv4 is usually represented in
denary
whilst IPv6 is usually represented
in
hexadecimal
IPv4 groups are between 0 and 255 whilst IPv6 is between 0 and FFFF
IPv4 is
32
bits whilst IPv6 is
128 bits
Q7
7
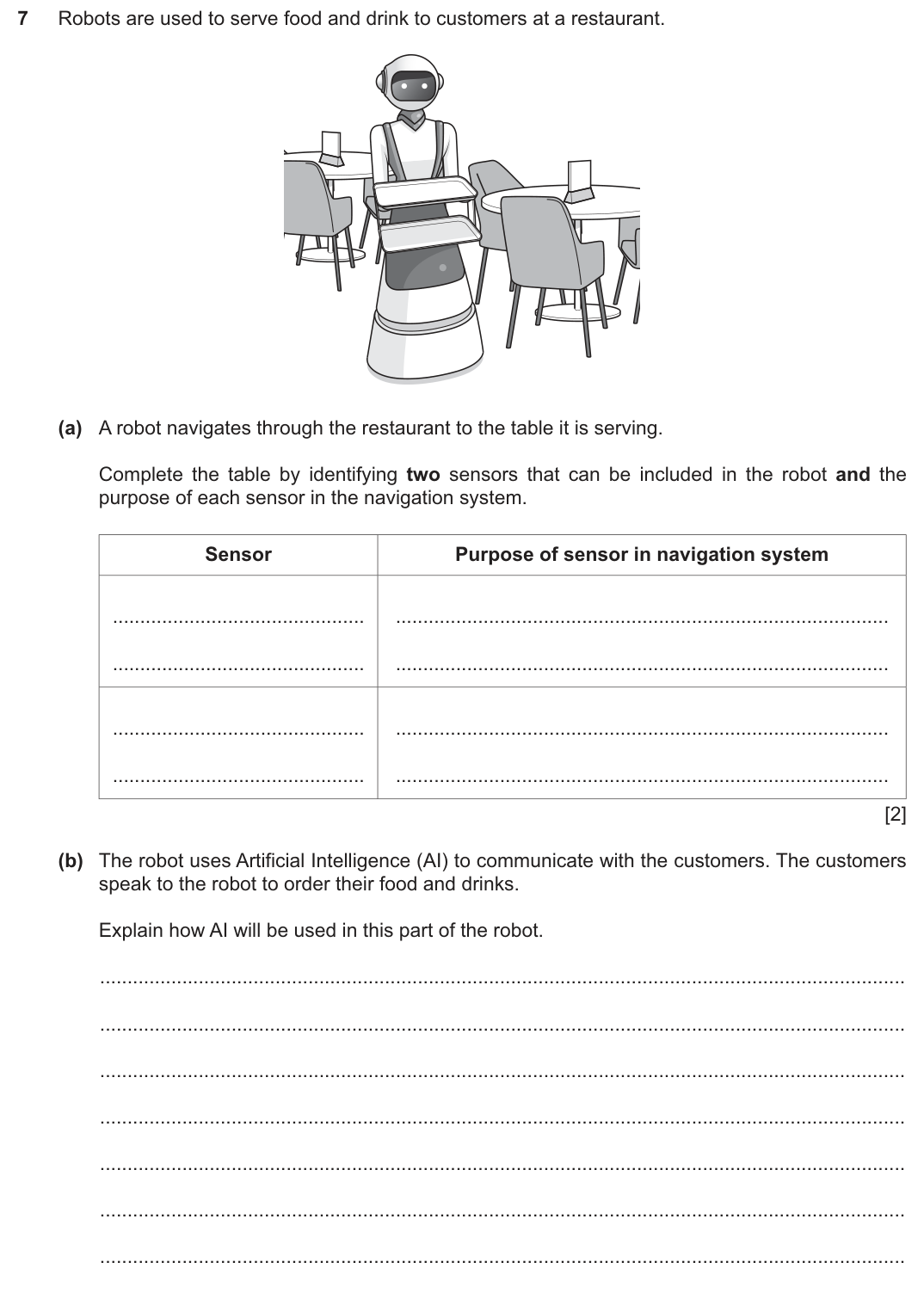
Robots are used to serve food and drink to customers at a restaurant.
(a) A robot navigates through the restaurant to the table it is serving.
Complete the table by identifying two sensors that can be included in the robot and the
purpose of each sensor in the navigation system.
Sensor
Purpose of sensor in navigation system
[2]
(b) The robot uses Artificial Intelligence (AI) to communicate with the customers. The customers
speak to the robot to order their food and drinks.
Explain how AI will be used in this part of the robot.
(c) The navigation system can be considered an example of a control system.
Describe how feedback is used in a control system.
............................................................................................................................................. [2]
(d) The robot includes a touchscreen for the customer to make their payment.
Describe the principal operation of a touchscreen.
............................................................................................................................................. [4]
,
,
(e) Program libraries were used when writing the robot’s software.
(i) State what is meant by a program library.
..................................................................................................................................... [1]
(ii) Some program libraries include Dynamic Link Library (DLL) files.
Describe the benefits of a programmer using a library with DLL files instead of using a
library that does not include DLL files.
..................................................................................................................................... [4]
,
,
(f) The data from the robots is transmitted to a central computer using a wireless connection.
(i) Complete the table by identifying and describing two methods of data verification that
can be used during data transfer.
Method
Description
1
2
[4]
(ii) Explain how encryption can protect the security of data during transmission.
..................................................................................................................................... [2]
Permission to reproduce items where third-party owned material protected by copyright is included has been sought and cleared where possible. Every
reasonable effort has been made by the publisher (UCLES) to trace copyright holders, but if any items requiring clearance have unwittingly been included, the
publisher will be pleased to make amends at the earliest possible opportunity.
To avoid the issue of disclosure of answer-related information to candidates, all copyright acknowledgements are reproduced online in the Cambridge
Assessment International Education Copyright Acknowledgements Booklet. This is produced for each series of examinations and is freely available to download
at www.cambridgeinternational.org after the live examination series.
,
,
Show mark scheme
7(a) [2 marks]
1 mark
for sensor
and
matching purpose to
max 2
:
Sensor
Purpose of sensor in navigation system
Pressure
To detect if a table or other obstacle has been hit // to detect
when food is put on/taken off the tray so it can move on
Infra-red
To detect if there is an obstacle in the way // to indicate that it
has reached the desired table
Sound
To detect if someone is speaking so that it can use AI to
decipher the speech and whether the robot is required to stop
for sensor
and
matching purpose to
max 2
:
Sensor
Purpose of sensor in navigation system
Pressure
To detect if a table or other obstacle has been hit // to detect
when food is put on/taken off the tray so it can move on
Infra-red
To detect if there is an obstacle in the way // to indicate that it
has reached the desired table
Sound
To detect if someone is speaking so that it can use AI to
decipher the speech and whether the robot is required to stop
7(b) [2 marks]
1 mark
each to
max 3
:
e.g.
Voice/speech recognition is used
... to identify if someone speaking
The sound is recorded and analysed
The audio recordings are compared to a database of words/sound waves
... to identify the word that has the highest probability of being said
Natural language recognition is used
Words are combined and compared to known sentences
… programmed action(s) for matching sentence(s) are performed
each to
max 3
:
e.g.
Voice/speech recognition is used
... to identify if someone speaking
The sound is recorded and analysed
The audio recordings are compared to a database of words/sound waves
... to identify the word that has the highest probability of being said
Natural language recognition is used
Words are combined and compared to known sentences
… programmed action(s) for matching sentence(s) are performed
7(c)
1 mark
each to
max 2
:
Feedback ensures that a system operates within set criteria / constraints
... by enabling system output to affect subsequent system input
... thus allowing conditions to be
automatically
adjusted
each to
max 2
:
Feedback ensures that a system operates within set criteria / constraints
... by enabling system output to affect subsequent system input
... thus allowing conditions to be
automatically
adjusted
7(d) [1 mark]
1 mark
each to
max 4
:
Resistive: The space between the conductive layers is removed/the
layers touch and a circuit is completed
Capacitive: The electrical charge changes where the user pressed
The point of contact is identified
... from the change in electrical field
The software/microprocessor
calculates
the coordinates
each to
max 4
:
Resistive: The space between the conductive layers is removed/the
layers touch and a circuit is completed
Capacitive: The electrical charge changes where the user pressed
The point of contact is identified
... from the change in electrical field
The software/microprocessor
calculates
the coordinates
7(e)(i)
1 mark
for:
Pre-written code/functions/routines that can be
imported/called
in another
program
for:
Pre-written code/functions/routines that can be
imported/called
in another
program
7(e)(ii) [4 marks]
1 mark
each to
max 4
:
Maintenance not needed to be done by the programmer
... because the DLL is separate from program
The calling program does not need recompilation by the programmer when
a DLL file changes
... because the DLL file can be updated independently of the calling
program
… updates will apply to all programs that use the DLL file
each to
max 4
:
Maintenance not needed to be done by the programmer
... because the DLL is separate from program
The calling program does not need recompilation by the programmer when
a DLL file changes
... because the DLL file can be updated independently of the calling
program
… updates will apply to all programs that use the DLL file
7(f)(i) [4 marks]
1 mark
for each correct method and
1 mark
for corresponding description to
max 4
:
Method
Description
Parity byte
An additional bit is added to make the number of 1s in the
byte odd or even to match the parity. If a byte with an odd
number of 1 bits is received when even parity is used, there is
an error.
Parity block Parity is calculated horizontally and vertically. A parity byte is
created from the bits produced by the vertical parity check.
This is sent with the data. The parity is re-checked when
received and the position of an incorrect bit can be
determined.
Checksum
A calculation is made from the data and the result transmitted
with the data. The receiver repeats the calculation and
compares the result with the value received. If the two are
different, there is an error.
for each correct method and
1 mark
for corresponding description to
max 4
:
Method
Description
Parity byte
An additional bit is added to make the number of 1s in the
byte odd or even to match the parity. If a byte with an odd
number of 1 bits is received when even parity is used, there is
an error.
Parity block Parity is calculated horizontally and vertically. A parity byte is
created from the bits produced by the vertical parity check.
This is sent with the data. The parity is re-checked when
received and the position of an incorrect bit can be
determined.
Checksum
A calculation is made from the data and the result transmitted
with the data. The receiver repeats the calculation and
compares the result with the value received. If the two are
different, there is an error.
7(f)(ii) [2 marks]
1 mark
each to
max 2
:
Encodes/scrambles data
... so if it is intercepted it cannot be
understood
Algorithm
/key
is required to decode the data
each to
max 2
:
Encodes/scrambles data
... so if it is intercepted it cannot be
understood
Algorithm
/key
is required to decode the data